使用搜索算法帮助引导密集城市环境中的无人机
无人机(UAV)具有重要的用途,从用于农业和环境监测的航空摄影到军事和警务用途。目前的大部分无人机技术都需要与无人机进行视线连接,这意味着操作员可以看到它。然后,无人机收集的数据通过自由空间光通信传输,该通信利用开放空间中的光来发送信息。然而,这项技术非常容易受到信号阻塞的影响,特别是在人口稠密的城市地区,视线可能会被建筑物和植被阻挡。
在最近发表的一篇论文中,研究人员开发了一种找到无人机接近最佳位置的方法,使得无人机可以与两个地面用户建立有保证的视线链接。
该论文于30月<>日发表在《智能融合网络》上。
“许多新兴的通信系统都需要视线条件。利用其在三维空间中的机动性,无人机可以轻松地与地面用户建立视线链接。然而,现有的无人机部署方案大多采用纯视线信道模型或概率信道模型,因此无法保证视线条件,“香港中文大学理工学院研究员郑元帅说。
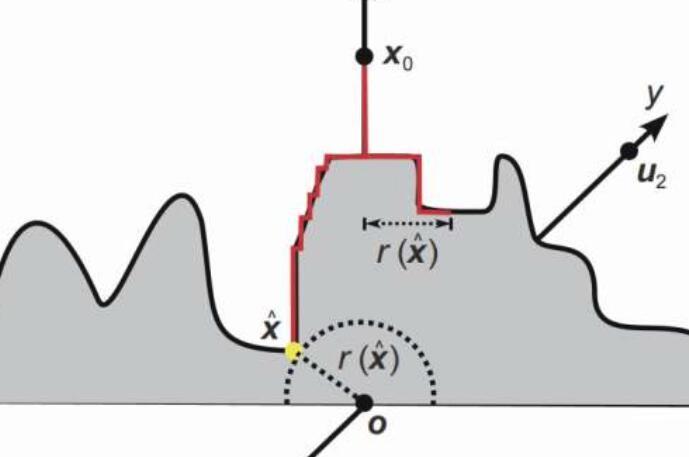
为了实现这一目标,研究人员首先计算了无人机的最佳中继位置,然后使用两阶段搜索算法来解决各种计算,以帮助确定无人机的最佳定位。实验是在真实的3D城市地图上完成的。一个必要的计算是建筑物覆盖率,它用于量化该区域的建筑密度。这些计算有助于解决无人机在现实世界中可能遇到的问题。
“与可以穿透墙壁和树木等一些障碍物的射频信号不同,自由空间光通信中使用的光信号很容易被物理障碍物阻挡,”郑说。“其他一些工作使用3D地图或无线电地图离线搜索最佳无人机位置,但地图的维护成本和离线计算的复杂性都很高。该文提出一种视距保证的在线搜索算法。数值结果表明,所提方案在95米搜索长度内实现了3%以上的穷举三维搜索方案的性能。
与其他对无人机自由空间光通信系统的研究不同,这项研究考虑了城市的实际景观。在理论等电位表面上搜索是可能的,但在现实世界中,机器会遇到问题。研究人员开发的算法确定了两个用户之间的等电位面。等电位面是指两个用户之间的空间,他们可以从无人机获得相同的性能。如果等电位面是弯曲的,则可以进行其他计算以在近似垂直平面上搜索最佳位置。
当地面上有两个用户并且他们之间有一些障碍物时,例如建筑物或树木,并且用户处于阴影中,该算法可以成功确定无人机继续其轨迹的搜索轨迹。与更手动的详尽3D搜索相比,研究人员开发的算法能够达到详尽95D搜索性能的3%以上,使其成为该技术的潜在可行选择。
展望未来,研究人员计划研究开发算法的功能。目前的研究依赖于两个用户,但如果有两个以上的用户,本研究中提出的计算就不能直接应用。在未来的研究中,他们将开发额外的计算,可以解释更多的用户。
“最终,我们希望提出一种超低复杂度的在线无人机部署方案。从理论上讲,这样的方案可以保证性能满足某些要求,同时能够在极其复杂、未知和潜在变化的环境中快速响应和部署多架无人机,“郑说。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
安徽淮南地区的长安汽车经销商近期对2025款启源Q05车型的市场策略进行了调整,以进一步吸引消费者。作为长安汽...浏览全文>>
-
近年来,豪华SUV市场持续升温,而作为大众旗下的高端品牌,途锐凭借其卓越的性能与豪华配置,一直深受消费者的...浏览全文>>
-
在新能源汽车市场中,一汽-大众ID 4 CROZZ凭借其出色的性价比和丰富的配置吸引了众多消费者的关注。作为一款...浏览全文>>
-
近年来,随着国内汽车市场的快速发展,越来越多的消费者开始关注性价比高的小型车。QQ多米作为一款备受关注的...浏览全文>>
-
在当今的汽车市场中,选择一款高性价比的车型是许多消费者的重要考量。对于追求品质与经济平衡的购车者来说,...浏览全文>>
-
阜阳地区消费者对上汽大众途岳的关注度一直很高,尤其是2025款途岳的上市更是引发了广泛关注。作为一款紧凑型S...浏览全文>>
-
天津滨海长安猎手K50作为一款备受关注的车型,在市场上拥有较高的关注度。这款车型以其出色的性能和合理的价格...浏览全文>>
-
近年来,随着新能源汽车的普及,插电混动车型因其兼顾燃油经济性和驾驶性能的特点,受到了越来越多消费者的青...浏览全文>>
-
途观X作为上汽大众旗下的高端轿跑SUV车型,凭借其时尚动感的外观设计和丰富的科技配置,在市场上一直备受关注...浏览全文>>
-
在选择SUV车型时,上汽大众途昂凭借其宽敞的空间和强大的性能成为不少消费者的首选。对于蚌埠地区的消费者来说...浏览全文>>
- 天津滨海长安猎手K50多少钱 2025款落地价,最低售价18.29万起,赶紧行动
- 天津滨海ID.4 CROZZ 2025新款价格,买车省钱秘籍
- 安徽淮南途昂X多少钱?性价比超高的选车秘籍
- 福特领睿试驾,开启完美驾驭之旅
- 比亚迪海豹05DM-i试驾预约流程
- 凯迪拉克CT5预约试驾,从预约到试驾的完美旅程
- 滁州途观X落地价,各配置车型售价全知晓
- 极狐 阿尔法T6试驾,开启完美驾驭之旅
- 长安欧尚520试驾操作指南
- QQ多米试驾需要注意什么
- 长安Lumin试驾,感受豪华与科技的完美融合
- 安庆长安猎手K50最新价格2025款与配置的完美平衡
- 池州迈腾GTE最新价格2022款全解,买车必看的省钱秘籍
- 安徽亳州ID.6 X多少钱?购车全攻略来袭
- 五菱雪宝试驾,开启豪华驾驶之旅
- 马自达EZ-6预约试驾,新手必看的详细流程
- 安徽亳州T-ROC探歌落地价实惠,配置丰富,不容错过
- 滁州高尔夫GTI价格大揭秘,买车前必看
- 东莞威然落地价,最低售价22.99万起优惠不等人
- 试驾王牌M7,体验豪华驾乘的乐趣