一种可以提高机器人抓取物体能力的模型
在现实世界中完成任务和任务时,理想情况下,机器人应该能够有效地抓取各种形状和成分的物体。然而,到目前为止,大多数机器人只能抓取特定类型的物体。
中国科学院和北京大学的研究人员最近开发了一种新的机器学习模型,可以帮助提高机器人的抓取能力。该模型发表在IEEE Transactions on Circuits and Systems for Video Technology中,专门设计用于预测机器人周围物体的抓取情况,以便它们能够设计出抓取这些物体的最佳策略。
“在智能制造、人机交互和家庭服务等现实世界应用中,机器人抓取变得越来越重要,”进行这项研究的研究人员之一Junzhi Yu告诉Tech Xplore。“抓取检测是机器人抓取的关键步骤,需要找到目标物体的最佳抓取。主流的编码器-解码器抓取检测解决方案在准确性和效率方面很有吸引力,但由于解码器中卷积结果的不均匀重叠会产生棋盘失真,因此它们仍然有限。此外,特征表示往往是不够的。
Yu和他的同事最近工作的主要目标是开发一个模型,以克服现有抓取检测框架的局限性。为此,他们创建了一个基于双胞胎反卷积和多维注意力的像素级抓取检测方法,这两种技术通常用于计算机视觉应用。
他们的方法旨在消除所谓的“棋盘伪影”,即在人工神经网络生成的图像中经常观察到的奇怪的棋盘状图案。此外,研究人员还加强了他们的模型优化图像中特定特征的能力。
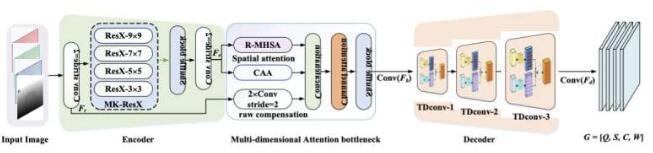
“所提出的像素级抓取检测网络由编码器、多维注意力瓶颈和基于双反卷积的解码器组成,”Yu 解释说。“给定输入图像,通过编码器执行特征提取,并通过我们的瓶颈模块进一步细化获得的特征图,该模块集成了残余多头自注意力(R-MHSA),交叉幅度注意(CAA)和原始补偿,以更好地关注感兴趣的区域。
团队瓶颈模块的三个组件产生三个不同的输出,这些输出在通道中连接并进一步调整以改善特征的表示。然后将生成的、经过改进的“特征图”馈送到模型的解码器(即,将特征图上采样为所需输出的模型)。该解码器通过执行三个所谓的级联孪生反卷积(对特征图进行上采样的过程)来最终预测与输入图像对应的抓取。
“通过我们的瓶颈模块,特征之间的内在关系被挖掘出来,特征从空间和通道维度有效地进行了微调,”Yu说。“特别是,孪生反卷积的引入通过在原始转置卷积分支上添加孪生分支来提供更好的上采样。因此,棋盘格工件的挑战得到了解决。
研究人员开发的方法的一个显着优点是它使用了孪生反卷积,通过它将孪生分支引入原始转置卷积分支,从而提高了模型的原始输出。此方法允许模型从输出中删除不需要的棋盘图案。
“应该注意的是,棋盘伪影源于不同位置卷积结果的不均匀重叠,”Yu说。“在这里,在原始转置卷积分支上平行引入一个孪生分支,以测量不均匀的重叠。更具体地说,孪生分支计算位置之间的相对重叠差异,并利用生成的重叠度矩阵对原始转置卷积的特征图进行重新加权。
在最初的测试中,新的像素级抓取检测方法取得了非常有希望的结果,因为它被发现可以平滑模型的原始输出并消除棋盘伪影。因此,它实现了很高的抓取检测精度。
作为他们研究的一部分,Yu和他的同事还能够将他们的方法扩展到需要像素检测的其他任务。除了可能提高现有和新开发的机器人的抓取技能外,它们的模型还可以很快应用于其他计算机视觉问题。
“在我们的下一个工作中,我们计划将所提出的方法与实际机器人系统中的实例分割相结合,以便更好地进行抓取预测,”Yu补充道。“例如,实例分割可用于生成有关对象配置文件和位置的有价值的信息,这些信息被馈送到解码器的双反卷积中,以进一步提高网络性能。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
安徽淮南地区的长安汽车经销商近期对2025款启源Q05车型的市场策略进行了调整,以进一步吸引消费者。作为长安汽...浏览全文>>
-
近年来,豪华SUV市场持续升温,而作为大众旗下的高端品牌,途锐凭借其卓越的性能与豪华配置,一直深受消费者的...浏览全文>>
-
在新能源汽车市场中,一汽-大众ID 4 CROZZ凭借其出色的性价比和丰富的配置吸引了众多消费者的关注。作为一款...浏览全文>>
-
近年来,随着国内汽车市场的快速发展,越来越多的消费者开始关注性价比高的小型车。QQ多米作为一款备受关注的...浏览全文>>
-
在当今的汽车市场中,选择一款高性价比的车型是许多消费者的重要考量。对于追求品质与经济平衡的购车者来说,...浏览全文>>
-
阜阳地区消费者对上汽大众途岳的关注度一直很高,尤其是2025款途岳的上市更是引发了广泛关注。作为一款紧凑型S...浏览全文>>
-
天津滨海长安猎手K50作为一款备受关注的车型,在市场上拥有较高的关注度。这款车型以其出色的性能和合理的价格...浏览全文>>
-
近年来,随着新能源汽车的普及,插电混动车型因其兼顾燃油经济性和驾驶性能的特点,受到了越来越多消费者的青...浏览全文>>
-
途观X作为上汽大众旗下的高端轿跑SUV车型,凭借其时尚动感的外观设计和丰富的科技配置,在市场上一直备受关注...浏览全文>>
-
在选择SUV车型时,上汽大众途昂凭借其宽敞的空间和强大的性能成为不少消费者的首选。对于蚌埠地区的消费者来说...浏览全文>>
- 天津滨海长安猎手K50多少钱 2025款落地价,最低售价18.29万起,赶紧行动
- 天津滨海ID.4 CROZZ 2025新款价格,买车省钱秘籍
- 安徽淮南途昂X多少钱?性价比超高的选车秘籍
- 福特领睿试驾,开启完美驾驭之旅
- 比亚迪海豹05DM-i试驾预约流程
- 凯迪拉克CT5预约试驾,从预约到试驾的完美旅程
- 滁州途观X落地价,各配置车型售价全知晓
- 极狐 阿尔法T6试驾,开启完美驾驭之旅
- 长安欧尚520试驾操作指南
- QQ多米试驾需要注意什么
- 长安Lumin试驾,感受豪华与科技的完美融合
- 安庆长安猎手K50最新价格2025款与配置的完美平衡
- 池州迈腾GTE最新价格2022款全解,买车必看的省钱秘籍
- 安徽亳州ID.6 X多少钱?购车全攻略来袭
- 五菱雪宝试驾,开启豪华驾驶之旅
- 马自达EZ-6预约试驾,新手必看的详细流程
- 安徽亳州T-ROC探歌落地价实惠,配置丰富,不容错过
- 滁州高尔夫GTI价格大揭秘,买车前必看
- 东莞威然落地价,最低售价22.99万起优惠不等人
- 试驾王牌M7,体验豪华驾乘的乐趣